L’évolution des systèmes de surveillance et de contrôle des mouvements au sol des aéroports
L’accroissement du trafic aérien, tant en Europe1 qu’aux États-Unis et en Asie, pose des problèmes de capacité et de sécurité aux autorités de l’aviation civile.
L’augmentation du trafic a des retombées non seulement au niveau de la gestion de l’espace aérien, mais également au niveau des aéroports qui constituent dans de nombreux cas aujourd’hui des goulets d’étranglement.
Dans le passé, les délais imputables aux mauvaises conditions climatiques induisaient principalement des perturbations dans la zone terminale de l’aéroport. Aujourd’hui, avec le développement du trafic, les retards enregistrés dans une zone terminale peuvent se répercuter sur l’ensemble du trafic aérien à l’échelle d’un pays ou même de l’Europe.
La sécurité est devenue un problème majeur dans cet environnement, impliqué par la réduction des espacements entre avions en vol et l’augmentation du nombre d’avions et véhicules circulant à la surface des aéroports. De ce fait, le nombre de collisions entre avions ou véhicules s’est très sensiblement accru ces dernières années2 sur les aéroports, en particulier lors des phases d’atterrissage, de décollage et de roulage au sol, au point de constituer aujourd’hui la principale cause d’accidents dans le transport aérien. Par ailleurs, la gestion des zones d’embarquement des avions est devenue très complexe.
En Europe, les extensions des aéroports sont de plus en plus difficilement admises par les riverains. Ceci oblige les autorités à privilégier l’optimisation des voies de circulation aérienne et des plates-formes aéroportuaires existantes.
Pour répondre de façon globale, les autorités de l’aviation civile des pays concernés ont entrepris d’améliorer et d’harmoniser les systèmes destinés au contrôle et à la gestion des avions.
La rénovation des systèmes de surveillance s’est faite en premier lieu au niveau du contrôle en route ou d’approche pour ce qui concerne le trafic aérien. À leur tour, les aéroports sont aujourd’hui directement concernés par la modernisation de leurs systèmes.
Ces systèmes doivent en particulier mieux s’interconnecter avec les systèmes existants ou futurs des autres organisations impliquées dans le transport aérien : les gestionnaires de l’aéroport et les compagnies aériennes.
Au niveau des aéroports, les systèmes, dits SMGCS3, de surveillance, de contrôle et de guidage des mouvements au sol permettent aujourd’hui d’accroître la sécurité et la capacité, notamment en cas de mauvaises conditions de visibilité.
Au-delà de la nécessité d’améliorer la sécurité actuelle face à la croissance du trafic, l’accroissement de la capacité d’un aéroport est un enjeu considérable sur le plan économique pour toute une région.
SMGCS4
La finalité d’un système SMGCS est de fournir aux contrôleurs les informations de position et d’identification des avions et des véhicules évoluant sur l’aéroport de façon précise et fiable.
La visualisation de ces informations sur une représentation en deux dimensions de l’aéroport à l’écran est devenue essentielle aux contrôleurs pour permettre d’assurer la sécurité, en particulier par mauvaises conditions climatiques, et d’accroître la capacité en évitant des collisions.
En l’absence de système SMGCS, la corrélation entre la position de l’avion et l’indicatif doit être effectuée mentalement par le contrôleur, entre la situation perçue en regardant à l’extérieur de la tour de contrôle – quand les conditions climatiques ou la taille de l’aéroport le permettent – et les informations synthétiques du plan de vol réunies sur des petits bouts de papier appelés » strips « .
Le second objectif du SMGCS est de réunir les informations utiles sur le trafic à venir, qu’il s’agisse des avions en phase d’atterrissage situés encore à plusieurs dizaines de milles nautiques de l’aéroport ou bien des avions en partance dans les dizaines de minutes qui suivent.
En regard de ces informations » tactiques « , le SMGCS doit être en mesure de fournir l’état des » ressources » de l’aéroport dont les contrôleurs peuvent disposer pour organiser en toute sécurité :
- l’atterrissage des avions en approche et le décollage des avions,
- un roulage rapide des avions vers ou depuis les parkings en évitant toute congestion sur les taxiways avec les avions arrivant et ceux en partance,
- le départ des avions à l’heure, en gérant le mieux possible les allocations de porte d’embarquement aux avions arrivants et les demandes d’autorisation de mise en route des moteurs ou de manœuvre de repoussement de l’avion de sa porte d’embarquement pour les avions au départ.
Les informations importantes pour le contrôleur sur les ressources disponibles sont par exemple :
- la configuration des pistes utilisables,
- l’état des pistes et des moyens d’aide à l’atterrissage,
- l’état des feux et éclairages permettant aux avions de se guider,
- les données météorologiques permettant d’ajuster en fonction de celles-ci le trafic et d’avertir les pilotes,
- l’état sur l’occupation des portes d’embarquement avec les heures prévues de départ des avions.
© IMAGE BANK/DIAPHOR
À plus long terme, les systèmes SMGCS pourront guider de façon dynamique les avions, retransmettre des informations vers les avions, permettant d’assister le pilote égaré ou bien sans visibilité à cause du brouillard, et pourquoi pas, de piloter automatiquement les avions… mais ceci est une autre histoire !
Pour l’heure et pour de nombreuses années encore, les contrôleurs de tour sont en quelque sorte les chefs d’orchestre de ce ballet incessant, duquel dépendent pour une bonne part notre sécurité quand nous prenons l’avion et notre ponctualité aux réunions.
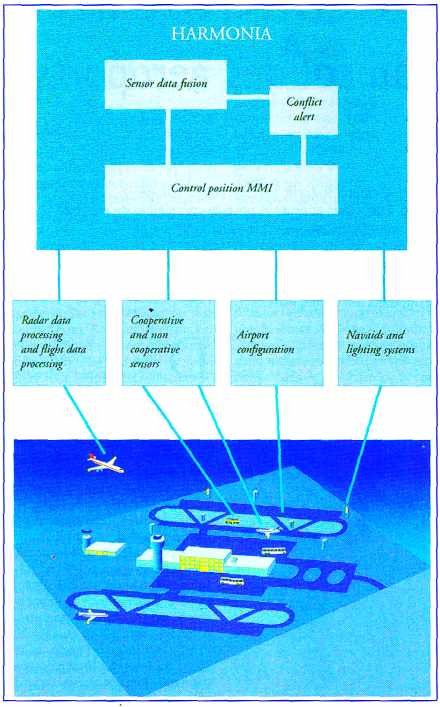
Un système SMGCS repose sur les sources d’information que lui fournissent des senseurs coopératifs et non-coopératifs :
• Les senseurs coopératifs fournissent une information d’identification ou une position à l’aide d’un message codé transmis par un système embarqué dit » coopératif « , c’est-à-dire devant être en état de fonctionnement pour se faire reconnaître du senseur.
Ces senseurs sont, par exemple, les systèmes d’identification dits » Mode S » fonctionnant à l’aide des messages de type Mode S transmis par les transpondeurs des avions de manière automatique et récurrente ; ou bien encore les stations sol D‑GPS (5) recevant de façon analogue sur une fréquence radio les positions élaborées par les systèmes de positionnement D‑GPS à bord des avions ou des véhicules.
• Les senseurs non-coopératifs fournissent une information de position et de classification à l’aide de la réception d’un signal réfléchi sur la cible, émis quelques instants plus tôt dans sa direction. La détection se fait de façon involontaire et transparente vis-à-vis de la cible.
Le senseur le plus connu est le radar dit de » surface » permettant la surveillance de tous types de cibles sur l’aéroport, de façon complètement indépendante de la cible. D’autres senseurs de type capteur magnétique par exemple, installés dans le revêtement en béton des bretelles d’accès ou de sortie de piste, permettent de signaler le passage d’un mobile à cet endroit.
Le cœur du système SMGCS est constitué d’un ensemble de calculateurs, assurant la fusion des informations issues des senseurs et de données externes issues des radars d’approche et des systèmes de traitement des plans de vol.
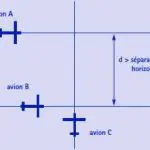
En fonction de la position respective des mobiles, le système fournit des alarmes quand des collisions potentielles surviennent, en particulier en cas d’incursion sur les pistes au moment du décollage ou de l’atterrissage d’un avion.
La visualisation doit permettre la prise en compte d’une situation de conflit de façon quasi immédiate par le contrôleur. Pour cela, cette visualisation doit être la plus synthétique et compréhensible possible sans requérir une série de manipulations à l’aide de menus et d’une souris.
L’interface utilisatrice de ces visualisations doit être reconfigurable pour s’adapter aux différents acteurs évoluant au sein d’une tour de contrôle :
- la position de contrôle dite » locale » en charge de la piste et de la zone de protection autour de la piste, en liaison avec le contrôle d’approche,
- la position de contrôle dite » sol » en charge du contrôle des mouvements des avions au sol et du guidage des avions quand les conditions le nécessitent,
- la position de contrôle dite » parking » en charge du contrôle sur les aires de parking en lien avec les autorités aéroportuaires et les compagnies aériennes,
- la position de » superviseur » qui comme son nom l’indique assure la supervision de l’ensemble, le contrôle de la plate-forme et l’adaptation des ressources en vue des prévisions de trafic.
La quantité d’informations affichées doit tenir compte du degré d’urgence auquel les différents contrôleurs sont confrontés.
Comme toujours en matière de sûreté de fonctionnement, la fiabilité, l’intégrité et la disponibilité des informations sont primordiales. L’architecture des systèmes SMGCS doit par conséquent être conçue pour garantir d’excellentes performances dans ce domaine.
L’intégration d’un système SMGCS dans l’environnement des systèmes souvent très diversifiés et hétérogènes selon les aéroports nécessite une grande modularité.
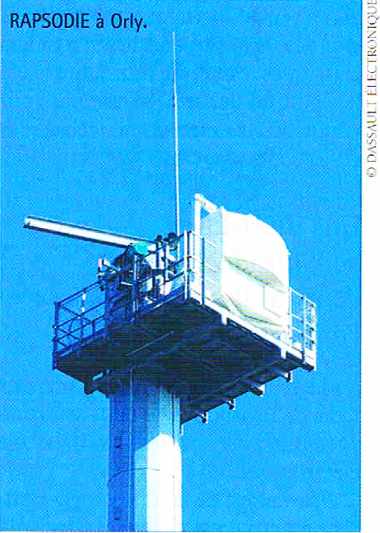
RAPSODIE
Le radar de surveillance des mouvements d’aéroport RAPSODIE est un élément important d’un système SMGCS du fait de son caractère non-coopératif.
Il faut rappeler à ce sujet qu’une partie importante des incursions sur les pistes se produisent avec des véhicules non-équipés de systèmes de positionnement. Perdu dans le brouillard, rien ne ressemble plus à un taxiway qu’un autre taxiway ou bien qu’une piste !
Une approche technologique et de réduction des coûts
Le radar RAPSODIE réunit un nombre de technologies empruntées aux radars militaires les plus modernes existant aujourd’hui, dans le but d’améliorer les performances et l’exploitation du radar et paradoxalement de réduire les coûts.
 Les radars de surface existant sur le marché sont basés sur des technologies datant de quinze à vingt ans. L’obligation de maintien en condition opérationnelle sur au moins quinze ans conduit à un coût très lourd que seuls les gros aéroports peuvent supporter. L’étroitesse du marché jusqu’à maintenant a limité le renouvellement des technologies par le simple fait des investissements successifs et importants qu’il supposait.
Les radars de surface existant sur le marché sont basés sur des technologies datant de quinze à vingt ans. L’obligation de maintien en condition opérationnelle sur au moins quinze ans conduit à un coût très lourd que seuls les gros aéroports peuvent supporter. L’étroitesse du marché jusqu’à maintenant a limité le renouvellement des technologies par le simple fait des investissements successifs et importants qu’il supposait.
Pour cela, un saut technologique était nécessaire, comparable à celui qui a eu lieu dans les radars militaires voici une dizaine d’années.
La démarche a consisté à chercher comment réduire le coût d’acquisition, d’installation et également de possession de ce type de radar en obtenant des performances supérieures à celles existant aujourd’hui, tout en offrant une modularité et une flexibilité plus grandes.
La recherche d’une solution à antenne fixe, permettant de s’affranchir des inconvénients liés aux radars classiques à antenne tournante, a été le point de départ de cette passionnante histoire à travers les techniques et les coûts associés.
Une illustration de l’introduction de nouvelles technologies : l’antenne active
Le radar RAPSODIE est le premier radar de l’aviation civile dans le monde avec une antenne active à balayage électronique.
L’avantage de la technologie d’antenne active est de permettre une réduction des pertes hyperfréquences à l’émission et à la réception, en disposant d’une batterie d’émetteurs à état solide de faible puissance plutôt qu’un seul émetteur centralisé. La redondance de la partie émission/réception – la moins fiable dans un radar – se trouve être ainsi assurée de facto.
La redondance accroît la disponibilité du matériel, et permet de continuer à fonctionner même si plusieurs modules émission/réception tombent en panne sans que les performances en soient dégradées.
Le coût de possession peut être ainsi réduit compte tenu de la plus grande fiabilité du matériel et d’une maintenance préventive plutôt que corrective.
Bien qu’elle soit plus performante, l’inconvénient majeur d’une antenne active est souvent son prix. Le problème du coût a pu être résolu par le choix d’un fonctionnement en bande X, bande dans laquelle les composants hyperfréquences sont disponibles à faible coût dans la mesure où la puissance émise unitairement par ces composants reste faible.
Le balayage électronique
Le balayage électronique permet de s’affranchir des problèmes d’exploitation liés aux radars de surface à antenne tournante, tels que l’indisponibilité prolongée lors des opérations de maintenance touchant à la mécanique de l’antenne, les vibrations transmises dans la tour dues à la vitesse de rotation élevée et au couple important des antennes, la nécessité d’une alimentation de puissance secourue pour faire fonctionner les moteurs.
 L’utilisation du balayage électronique permet également de bénéficier d’une grande flexibilité dans la surveillance de l’aéroport, de façon à couvrir en priorité les pistes et le pourtour des pistes sur les voies de décélération, là où les avions ont une vitesse importante nécessitant un rafraîchissement des détections au moins toutes les secondes. Les autres zones, où la vitesse des mobiles est moindre, sont couvertes de façon adaptée avec une fréquence de rafraîchissement plus faible.
L’utilisation du balayage électronique permet également de bénéficier d’une grande flexibilité dans la surveillance de l’aéroport, de façon à couvrir en priorité les pistes et le pourtour des pistes sur les voies de décélération, là où les avions ont une vitesse importante nécessitant un rafraîchissement des détections au moins toutes les secondes. Les autres zones, où la vitesse des mobiles est moindre, sont couvertes de façon adaptée avec une fréquence de rafraîchissement plus faible.
Bien que complète, la couverture à 360° d’une antenne tournante conduit dans bien des cas à couvrir des secteurs entiers qui sont sans intérêt pour les contrôleurs. Pour les aéroports de taille moyenne avec une seule piste ou bien pour ceux comportant deux pistes parallèles, une couverture de 150° est suffisante. Or de telles configurations de pistes sont aujourd’hui considérées comme celles susceptibles d’absorber le plus de trafic.
Une forme d’onde par compression d’impulsion et traitement Doppler
Pour garantir une portée de plusieurs kilomètres, et couvrir ainsi la surface de l’aéroport avec une faible puissance d’émission, le bilan énergétique impose un certain contraste entre le signal rétrodiffusé par la cible fixe ou mobile et le niveau du signal rétrodiffusé par le sol ou par la pluie ou la neige. Ce contraste est lié à la réflectivité de la cible (Surface Équivalente Radar), du sol, de la pluie ou de la neige et à la taille de la cellule de détection. Plus la cellule de détection est petite, plus la détection des cibles de faible SER est possible.
Le radar RAPSODIE adopte une cellule à trois dimensions (gisement, distance et doppler) au lieu de deux. Toutes choses égales par ailleurs, l’introduction de la discrimination Doppler permet de mieux détecter les cibles mobiles. La compression d’impulsion permet d’obtenir la résolution en distance compatible avec les besoins opérationnels c’est-à-dire de l’ordre de quelques mètres.
Un extracteur avec adaptation automatique des seuils de détection
Le radar RAPSODIE comporte un système de régulation automatique des seuils tenant compte des variations de réflectivité du sol en fonction de sa nature, des évolutions au cours du temps dues par exemple aux conditions climatiques changeantes (neige) ou bien encore à l’herbe qui pousse…
Le traitement du radar intègre également une régulation instantanée des seuils en cas d’intempéries, de pluie ou de neige. Ce principe permet de rejeter le » clutter » météorologique en associant une nouvelle forme d’onde permettant de maintenir la même sensibilité en détection.
Le but de ces traitements est d’éviter la génération de fausses alarmes.
Un traitement complexe de regroupements des plots et pistage intégrant une base de données
Le radar RAPSODIE dispose d’un traitement totalement numérique, c’est-à-dire intégrant un système de pistage fournissant des pistes-radar, susceptibles d’être visualisées directement ou bien d’être exploitées par la fusion de données d’un système SMGCS.
Les traitements mis en œuvre dans le radar font appel à des algorithmes élaborés de regroupement des plots en cible et de pistage des cibles selon plusieurs critères, en y intégrant des informations venant d’une base de données réunissant des informations liées à la topographie et à la configuration de l’aéroport, à la vitesse maximale que peuvent avoir les mobiles sur les différentes zones.
Les différents traitements-radar mis en œuvre peuvent être aisément reconfigurables en fonction des évolutions de l’aéroport susceptibles de se produire au cours du temps : nouvelle piste ou bretelle d’accès, nouveau terminal.
Une amélioration de la fiabilité et de la disponibilité à la clef
La prise en compte de la fiabilité et de la disponibilité est primordiale dans la conception d’un système SMGCS devant fonctionner de façon continue 24 heures sur 24. La moindre perturbation ou interruption des systèmes peut conduire rapidement à la saturation et la paralysie d’un aéroport, notamment en cas de mauvais temps.
Les choix technologiques du radar RAPSODIE permettent d’améliorer de manière significative le niveau de fiabilité et de disponibilité habituellement rencontré sur ce type d’équipement.
L’emploi de standards reconnus permet, d’une part, de maintenir une pérennité plus grande des solutions techniques au cours du cycle de vie du radar, et d’autre part, d’envisager une réduction des coûts d’exploitation.
Une installation adaptée à la topographie de l’aéroport
Le radar RAPSODIE est particulièrement bien adapté aux aéroports de taille moyenne non équipés aujourd’hui.
Pour des gros aéroports comportant plusieurs pistes avec de nombreux masques dus aux bâtiments, il est possible de mettre en œuvre plusieurs antennes RAPSODIE pour s’affranchir de ces masques.
Le radar RAPSODIE permet également de compléter une couverture radar existante, à la suite d’une extension de l’aéroport.
Conclusion
Pour faire face à la croissance du trafic, les aéroports ne peuvent souvent envisager d’extension à l’extérieur de leur périmètre actuel, pour des raisons liées à l’environnement.
Les systèmes SMGCS sont le moyen d’améliorer la surveillance et le contrôle des mouvements sur l’aéroport et par conséquent d’optimiser les moyens actuels (pistes) des aéroports. Ils peuvent en particulier concourir à l’augmentation de la capacité en cas de mauvaises conditions climatiques.
Les limitations dans l’augmentation de la capacité des aéroports proviennent également du manque de capacité d’accueil des passagers et du nombre de portes d’embarquement.
L’approche modulaire des systèmes SMGCS HARMONIA et RAPSODIE pourrait là encore indirectement permettre l’extension de zones de terminaux ou bien de zones commerciales sur des terrains aujourd’hui » gelés » en raison de la réglementation.
Cette réglementation officielle datant de 1986 impose toujours que la visibilité des différentes zones d’un aéroport soit assurée par les contrôleurs depuis la tour de contrôle, que l’aéroport soit ou non équipé d’un système SMGCS.
Dans la pratique et compte tenu des contraintes exercées par l’augmentation du trafic, un petit nombre d’aéroports à travers le monde utilisent déjà opérationnellement ces systèmes.
Au-delà de l’évolution attendue de la réglementation OACI (6), la standardisation des données échangées par les systèmes SMGCS doit permettre également une intégration plus aisée de ces systèmes et par conséquent la généralisation de ces systèmes sur l’ensemble des aéroports.
Le développement du transport aérien et le maintien de la sécurité des avions sont à ce prix.
__________________________________
1. Supérieur à 5 % par an pour les dix prochaines années en Europe.
2. 292 incursions sur pistes répertoriées pour la seule année 1996 aux états-Unis.
3. Surface Movement Guidance and Control System.
4. Dassault électronique a développé une offre complète en SMGCS appelée HARMONIA.
- Marché RAPSODIE STNA sur l’aéroport d’Orly.
- Marché RAPSODIE FAA sur l’aéroport de Norfolk en Virginie (US) incluant un radar, une visualisation radar et des outils d’exploitation et de configuration.
- Marché SMGCS financé par la Commission européenne (DG VII) sur l’aéroport de Cologne-Bonn en Allemagne comprenant un radar RAPSODIE et le cœur du système SMGCS.
- Marché SMGCS HARMONIA de la direction de l’aviation civile de Dubaï (émirats arabes unis) incluant deux radars RAPSODIE.
5. Le GPS dit » Différentiel » permet d’obtenir une précision accrue par rapport au positionnement GPS classique. Les récepteurs GPS de ce type pourraient être disponibles à bord des avions à l’horizon de 2005 et le sont déjà pour les véhicules (systèmes SYLETRACK ou GPSTRACK de Dassault Sercel Navigation et Positionnement (DSNP)).
6. Organisation de l’aviation civile internationale.


Commentaire
Ajouter un commentaire
smgc
C tres bien c systeme, mais combien peut couté son implantation ?