Quelle robotique humanoïde en 2020 ?

La science-fiction imagine souvent une humanité entourée de robots l’assistant dans ses tâches quotidiennes. L’imagination dans ces œuvres quant à ce que pourraient être ces robots, leurs formes, leurs fonctions, revient pourtant souvent à une forme humanoïde. Mais pourquoi construire des robots humanoïdes ? et vers quoi vont-ils ?
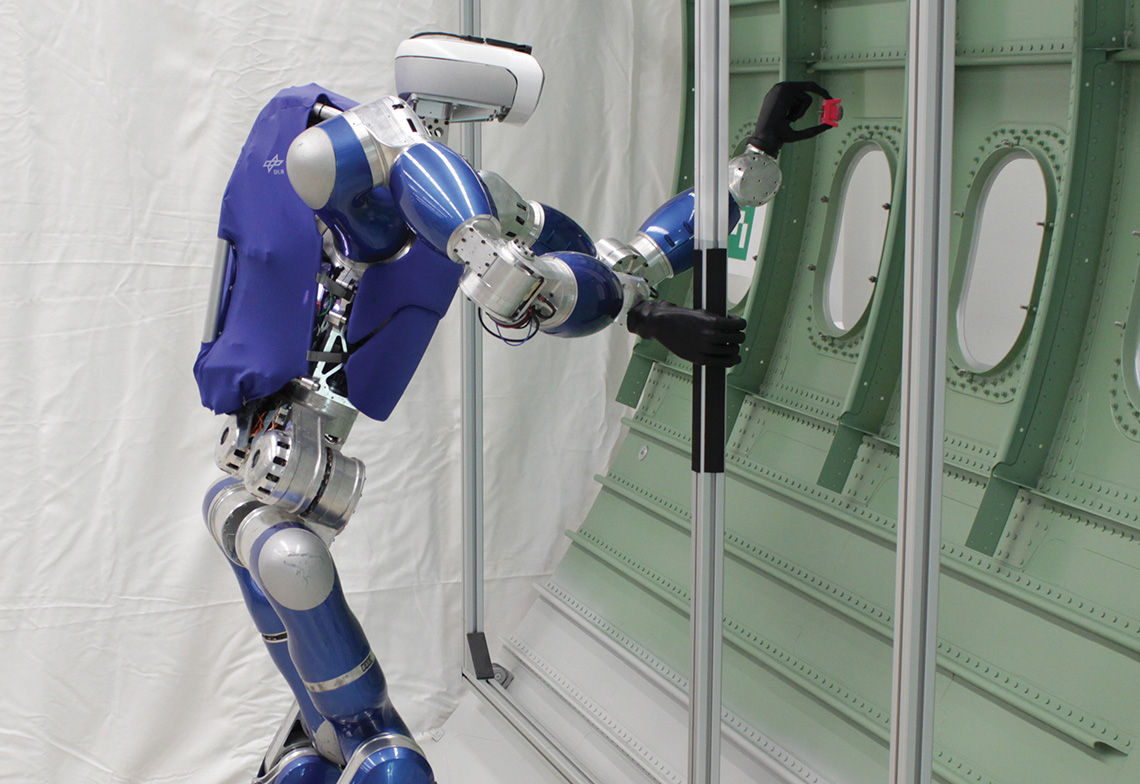
Un constat : les Japonais, mais aussi les Américains et les Européens développent des robots serviteurs humanoïdes. Par exemple, tous les composants de la Station spatiale internationale et de futurs avant-postes lunaires ou martiens doivent pouvoir être utilisés par des astronautes. Ces systèmes doivent donc être conçus avant tout pour des êtres humains. La Nasa en est alors venue à développer des Robonauts humanoïdes, capables d’interagir avec ces systèmes comme les astronautes le font eux-mêmes, dans l’objectif de les délester de tâches banales (inspection, entretien, manutention…), pour qu’ils se concentrent sur les tâches requérant réellement leurs compétences. L’Europe a de son côté financé récemment une Action de recherche et innovation intitulée Comanoid, faisant la démonstration de robots capables de se déplacer dans un site d’assemblage Airbus, avec ses escaliers et son sol encombré, pour délester les opérateurs humains de tâches de manipulation simples. Dans ce cas comme dans le précédent, une forme humanoïde permet au robot de s’intégrer facilement à un environnement et des processus conçus avant tout pour des êtres humains.
REPÈRES
On peut appeler humanoïde tout robot reproduisant tout ou partie de la forme et des capacités d’un humain, mais nous considérerons ici le robot humanoïde « complet », constitué de deux bras, deux jambes, un tronc et une tête, capable de saisir des objets avec ses mains, de se déplacer en marchant avec ses pieds.
Robots humanoïdes et robots prothèses : des problématiques communes
L’assistance aux humains constitue l’essence même des robots prothèses et orthèses. Or, pour agir au contact même du corps humain, ils doivent en reprendre la forme. L’exemple le plus emblématique à ce jour est peut-être le travail réalisé par l’entreprise parisienne Wandercraft, dont les robots enveloppent le corps de personnes paraplégiques pour permettre de marcher de façon autonome, sans besoin d’aide ou d’appuis supplémentaires.
Le corps joue aussi un rôle de premier plan dans la communication non verbale. L’être humain présente une capacité naturelle à interpréter les postures et les mouvements du corps humain. Un robot humanoïde peut en tirer parti pour communiquer plus efficacement avec nous. Ainsi, des robots humanoïdes sont utilisés avec succès comme intermédiaires rassurants entre des enfants autistes et leur entourage. Il convient évidemment de faire attention au risque d’autant plus prononcé de projeter sur le robot des motivations, voire des émotions, qu’il ne ressent pas.
La forme humanoïde n’est évidemment pas la seule possible. Après la catastrophe de Fukushima, on a envoyé des robots téléopérés, équipés de chenilles et de bras articulés, habituellement voués au déminage. Mais le corps de ces robots, bien que téléopérés par des êtres humains, n’avait pas toujours la dextérité requise. Des opérateurs humains ont donc été envoyés malgré la radioactivité de l’environnement. Car l’extraordinaire efficience humaine réside autant dans sa tête que dans son corps et dans sa dextérité naturelle.
“Les sciences de l’ingénieur ont encore
de beaux jours devant elles.”
Où en sommes-nous de la mise en œuvre de robots humanoïdes ?
Le mouvement humanoïde (équilibre, déplacement, manipulation) est maintenant compris dans les grandes lignes. Les démonstrations les plus fameuses sont certainement celles réalisées par les robots de Boston Dynamics, qui vont jusqu’à réaliser des sauts périlleux. Mais ces capacités impressionnantes ont un coût démesuré. Le simple coût de fabrication de ces robots, n’incluant pas le coût de mise en œuvre ou d’entretien, correspond à plus d’un siècle de salaire minimum. Pour autant, ces mêmes robots restent incroyablement peu fiables.
Car, pour positionner et orienter indépendamment ses pieds, ses mains, son tronc et sa tête, chaque jambe, chaque bras d’un robot humanoïde doit être équipé d’au moins six axes de rotation indépendants. Puisqu’il faut des mobilités supplémentaires dans le tronc, le cou, les mains (pour la préhension), un robot humanoïde finit par devoir être équipé d’au moins trente axes de rotation indépendants. Cela veut dire autant de moteurs, autant d’électronique de contrôle, qui introduisent autant de fragilités, autant de complexité, autant de consommation énergétique, autant de coûts de conception, de fabrication, d’entretien. Et ces moteurs doivent être parfaitement coordonnés pour réaliser correctement le moindre mouvement, ce qui nécessite des capteurs et des actionneurs précis et donc coûteux, mais aussi des calculs d’une complexité telle que la consommation énergétique du calculateur seul peut être comparable à la consommation énergétique de tous les moteurs réunis !
Ces problèmes de coût et de fiabilité sont intimement liés, en ce que nous ne savons toujours pas définir quelles spécifications garantissent un niveau de performance donné. On continue ainsi à concevoir des robots humanoïdes dont certains composants sont surdimensionnés, d’autres sous-dimensionnés, et dont ni le coût ni le niveau de performance ne sont pleinement maîtrisés. En ce temps de crise écologique, tout projet d’ingénierie se doit pourtant d’être économe en ressources.

Une application pour les méthodes d’apprentissage artificiel ?
Tous les résultats obtenus à ce jour résultent d’une application classique de sciences de l’ingénieur : théories des mécanismes et des systèmes dynamiques, méthodes numériques associées. Le problème est complexe mais, en tirant parti d’hypothèses simplificatrices raisonnables, on peut obtenir de bons résultats. L’équilibre et les déplacements peuvent ainsi être analysés et synthétisés en partant d’une poignée de concepts simples : les équations du mouvement relient le centre de masse du robot et son moment angulaire à ses différents points d’appui et au centre de pression des forces qui en résultent.
Un robot ne peut-il pas « apprendre à marcher » par lui-même, en tâtonnant, en enregistrant ses succès et ses erreurs ? C’est ce que vise l’apprentissage par renforcement, utilisé avec succès par exemple pour le jeu de go. Un robot quadrupède a pu tout récemment « apprendre » à garder l’équilibre de cette manière à l’École polytechnique fédérale de Zurich. Mais la grande limite de cette approche est qu’elle consiste ni plus ni moins à régler un nombre faramineux de paramètres (des millions) dont on peut difficilement tirer le moindre enseignement. De ce point de vue, ces méthodes d’apprentissage artificiel sont insuffisantes et les sciences de l’ingénieur ont encore de beaux jours devant elles.




