
So-grid : observer et surveiller les réseaux électriques






Le projet SO-grid fut conçu et développé pour tester le contrôle d’un réseau de distribution électrique moderne, intégrant des sources d’énergie renouvelable entre autres par le biais d’une communication « Courant porteur en ligne ». Le projet donna lieu à la conception de nouveaux outils de mesure (capteurs), protocoles de communication, et méthodes innovantes pour la planification du déploiement de capteurs dans un réseau existant.
Les grands acteurs des marchés électriques investissent de plus en plus dans l’adéquation de leurs réseaux de transport et de distribution. En France, par exemple, EDF, Enedis (ex-ERDF) et RTE subventionnent plusieurs actions de recherche en mathématiques appliquées, informatique et ingénierie (par exemple grâce à l’initiative PGMO www.fondation-hadamard.fr/PGMO). La différence des besoins par rapport au passé est que l’approvisionnement et la demande de puissance sont devenus moins prévisibles et centralisés, et ce à cause, entre autres, des sources d’énergie renouvelable. Dans un scénario centralisé, les quelques pics de demande sont d’habitude assez bien gérés par la capacité résiduelle du réseau, ce qui devient de plus en plus difficile aujourd’hui, avec des conséquences catastrophiques. La gestion d’un réseau électrique est une tâche difficile. La modélisation des éléments du réseau utilisée aujourd’hui par des outils de planification fait des approximations parfois grossières par rapport à la réalité physique (une approche précise mènerait à des problèmes trop difficiles à résoudre). Pire, il ne semble pas y avoir une standardisation commune et acceptée des approximations de modélisation.
Par exemple, considérons un des problèmes fondateurs de la distribution de l’électricité : l’Alternating Current Optimal Power Flow (ACOPF). Le courant électrique oscille dans les câbles de 50 à 60 fois par seconde. Dans les équations de l’ACOPF, par ailleurs, le courant est modélisé plutôt comme un liquide qui passe dans des paires de tuyaux parallèles, dans les deux directions opposées. Dans ce cas, nous utilisons la moyenne comme approximation [1]. Nous n’approximons pas tout, évidemment : d’autres propriétés du courant alternatif sont bien représentées dans le modèle.
REPÈRES
Dix partenaires industriels et académiques ont participé au projet SO-Grid lancé en 2013. L’École polytechnique fut impliquée dans la conception des protocoles de communication sur les lignes de transport de puissance et le déploiement optimal des capteurs sur le réseau. Les activités de recherche ont été menées par des professeurs et chercheurs du laboratoire d’informatique (LIX), coauteurs de cet article.
Le réseau intelligent, nouveau mode de transport électrique
Au début des années 2000, un nouveau type de transport électrique fut conçu : le réseau intelligent (smart grid) [2, 5]. Un tel réseau devrait : (a) éliminer la possibilité des coupures électriques (blackout) à large échelle engendrées par des pannes ponctuelles ; (b) intégrer la génération de puissance à partir de sources d’énergie renouvelable ; © prédire et réagir aux changements imprévus de demande de puissance ; (d) pouvoir changer d’échelle en cas d’augmentation du nombre d’utilisateurs du réseau ; et (e) être doté d’outils de prise de décision suffisamment sophistiqués pour pouvoir évaluer le prix unitaire de puissance correctement et de manière transparente. Ce réseau devrait aussi pouvoir fonctionner de manière fortement (voir complètement) automatisée, disposer d’une infrastructure de communication très avancée, et savoir se défendre des attaques cybernétiques. Toutefois, il est impossible de changer un réseau existant en smart grid sans une phase de tests très longue et poussée : c’est la véritable motivation du projet SO-grid. Une zone proche de Toulouse fut choisie pour un test de transformation du réseau existant en smart grid, avec une attention particulière portée au contrôle, à la récolte et à la transmission des données.
Tester un système de surveillance
Plus précisément, le projet SO-grid fut démarré pour tester un système de surveillance (monitoring), collecter et analyser des données du réseau, dont la communication repose sur la technologie CPL. Au lieu de déployer un réseau de communication parallèle au réseau de distribution (solution coûteuse), ou d’utiliser des modalités de communication sans fil (GPRS, Edge, 3G/4G) (solution non sécurisée), la communication CPL combine les fréquences de distribution avec celles de communication sur les mêmes câbles. Ces fréquences étant très différentes, nous pouvons les distinguer en utilisant l’analyse de Fourier.
Dans le reste de cet article, nous allons nous concentrer sur une tâche particulière que nous avons menée au sein du projet SO-grid : le placement optimal des capteurs dans un réseau électrique. Pour des raisons de vulgarisation, nous avons fait abstraction de certains détails techniques qui sont expliqués en profondeur dans deux articles scientifiques [3, 4].
Méthodes mathématiques
La science des décisions est une discipline à la frontière des mathématiques appliquées, de l’informatique et de l’ingénierie. Une branche de cette science, qui s’appelle recherche opérationnelle (RO), s’occupe du développement des modèles mathématiques pour la prise automatique de décisions à partir d’une suite de données d’entrée. Les modèles de la RO consistent en un objectif (à minimiser ou maximiser) et en un ensemble de contraintes (à satisfaire), qui limitent l’extension des optima de la fonction de coût. Les fonctions mathématiques impliquées dans l’objectif et les contraintes sont exprimées en fonction de certaines variables appelées variables de décision. Nous utilisons des algorithmes pour identifier, dans l’ensemble de toutes les valeurs des variables de décision qui satisfont les contraintes, celles qui optimisent l’objectif. En termes de notation mathématique, nous avons :
opt{f(x) | quel que soit i ≤ m gi(x) ≤ 0} (1)
L’opérateur opt peut être soit « min » ou « max » selon la direction d’optimisation de la fonction objective, qui est f(x). Les variables de décision sont représentées par le vecteur x = (x1, …, xn). Le reste de la phrase formelle en Éq. (1) signifie que « pour tous les indices i plus petits que m nous imposons les contraintes que les fonctions gi(x) atteignent une valeur non-positive ».
En résumé : les dimensions du problème sont données (nous prenons n décisions assujetties à m contraintes), et nous cherchons à affecter des valeurs à x telles que gi(x) ≤ 0 pour tout i ≤ m, et f(x) est optimisée. L’Éq. (1) s’appelle une formulation de programmation mathématique. Nous pouvons transformer la grande majorité des problèmes de décision intéressants en pratique et les représenter sous la forme de l’Éq. (1). Une fois formulé, le problème doit être résolu. Nous cherchons des solutions par l’utilisation de certains algorithmes appelés solveurs. L’efficacité et la précision des solveurs dépendent de plusieurs facteurs dont le principal est la linéarité ou la non-linéarité des fonctions f(x) et gi(x) pour tout i ≤ m. Un autre facteur déterminant est la taille du problème (n, m, ainsi que la longueur des descriptions des fonctions).
Formalisation du problème
Le problème à résoudre dans le cadre du projet SO-grid est le suivant : étant donné un réseau, où faudrait-il placer les capteurs afin de pouvoir mesurer la tension et le courant dans tout le réseau, et de telle sorte que le nombre de capteurs soit le plus petit possible ? La fonction de coût est donc le nombre de capteurs, et la contrainte est que ce nombre réduit de capteurs doit pouvoir assurer l’observabilité de la tension en tout nœud et du courant sur chaque lien du réseau. Le premier pas a été de proposer une formalisation mathématique de ce problème, selon les principes énoncés. Nous avons modélisé le réseau avec un graphe G = (V,E) (où V est l’ensemble des sommets représentant les nœuds et E l’ensemble des arêtes correspondant aux liens, que nous allons supposer non orientés). Nous avons utilisé la loi d’Ohm pour réduire le problème à l’observabilité de la tension en chaque sommet. Nous avons affecté une variable de décision booléenne à chaque sommet, qui prend la valeur 1 si nous installons un capteur sur ce sommet, et 0 dans le cas contraire.
Propagation de l’observabilité
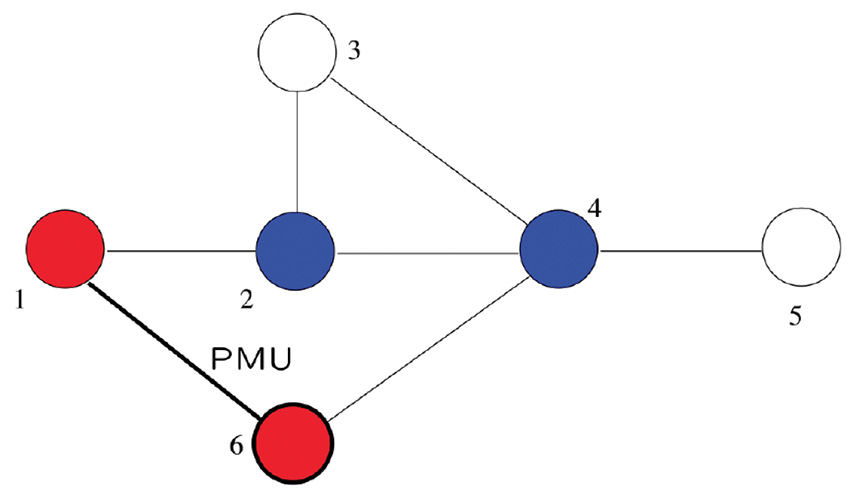
La loi de Kirchhoff, une loi fondamentale de l’électricité, peut également être prise en compte. Cette loi dit que la somme des courants entrant et sortant des arêtes adjacentes à un sommet donné est zéro. La conséquence sur l’observabilité des tensions aux sommets, par la loi d’Ohm, est surprenante : si nous connaissons la tension à un sommet donné ainsi que celle de tous ses sommets adjacents sauf un, alors nous pouvons facilement calculer la tension en ce dernier sommet sans devoir la mesurer directement. Après cette opération, nous pouvons encore vérifier si d’autres situations similaires ont été créées grâce aux nouvelles tensions calculées. Si de telles situations existent, nous calculons les tensions aux sommets correspondants. Nous constatons donc que cette opération se répète jusqu’à l’épuisement des opportunités. Pour illustrer ce processus de propagation de l’observabilité donné par un positionnement de capteurs, considérons l’exemple suivant (voir shéma page 52). Le capteur, dont le nom technique est Phasor Measurement Unit (PMU), est installé sur le sommet 6 en direction du câble représenté par l’arête {1, 6}. Ce PMU mesure la tension au sommet 6 et le courant sur l’arête {1, 6}. Par la loi d’Ohm nous déduisons la tension au sommet 1. Maintenant nous sommes dans la situation évoquée précédemment : nous connaissons la tension au sommet 1, et toutes les tensions aux sommets adjacents sauf une, i.e. celle du sommet 6 mais pas du sommet 2. En utilisant la loi de Kirchhoff et ensuite celle d’Ohm, nous pouvons calculer également la tension au sommet 2. Il en est de même pour l’arête {4, 6} et le sommet 4. L’observabilité se « propage » ainsi à travers le graphe : nous connaissons la tension aux sommets 1, 2 et 4, nous pouvons donc la calculer au sommet 3. Le lecteur pourra facilement vérifier que nous pouvons observer toutes les tensions et tous les courants du réseau à partir de l’installation d’un seul PMU sur le sommet 6 le long du câble {1, 6}.
“Nous disposons d’outils logiciels très avancés,
qui permettent la résolution de problèmes de taille considérable
en temps limité”
Dynamique de l’observabilité
Il est donc clair que l’observabilité est un processus dynamique : à chaque étape, nous vérifions s’il existe un sommet dont sa tension et celles de ses sommets adjacents sont connues, à l’exception d’une seule. Nous calculons alors cette tension. Cette nouvelle observation peut engendrer d’autres possibilités similaires. Le processus s’achève lorsqu’il n’y a plus de pareilles situations. À ce point, nous contrôlons si la tension est connue à tous les sommets. Si tel n’est pas le cas, un PMU supplémentaire doit être installé pour observer d’autres tensions à de nouveaux sommets, et le processus est réitéré. Pour formuler un programme mathématique qui décrive correctement ce processus, il faudrait ajouter des variables de décision : à la place d’avoir une variable booléenne par sommet, nous aurons besoin d’une variable par sommet et par pas de temps (qui sert à décrire le processus dynamique). Nous obtenons alors une formulation valide, mais avec beaucoup de variables pour pouvoir la résoudre dans des délais acceptables. Une solution à cette difficulté s’obtient en considérant qu’une fois observé, tout sommet reste observé : nous disons alors que la dynamique de l’observabilité est monotone. Une théorie due à Tarski nous assure alors qu’il y a un plus petit point fixe unique de cette dynamique. Nous avons démontré que ce point fixe correspond à l’ensemble des sommets observés lorsque le processus dynamique arrive à terminaison. En général, un point fixe y d’une fonction φ satisfait l’équation :
φ (y) = y, (2)
dite de point fixe. Modéliser le point terminal de la dynamique de l’observabilité avec un point fixe nous permet de ne plus indexer les variables de décision par pas de temps : il nous suffit de définir une variable booléenne par sommet. Nous dérivons donc une nouvelle formulation basée sur l’Éq. (2). Cependant cette formulation est non-linéaire, car elle intègre deux minimisations imbriquées : celle pour la réduction du nombre des PMU installés, et celle pour l’obtention du plus petit point fixe. Une fois encore, cette nouvelle formulation est trop difficile à résoudre. Heureusement, nous pouvons obtenir une formulation où toutes les fonctions sont linéaires, avec un seul opérateur de minimisation, et un nombre limité de variables. Ces types de problèmes restent NP-difficiles, mais en pratique nous disposons d’outils logiciels très avancés, qui permettent la résolution de problèmes de taille considérable en temps limité.
Références
[1] Bienstock (D.), Electrical Transmission System Cascades and Vulnerability : an Operations Research Viewpoint, Number 22 in MOS-SIAM Optimization, SIAM, Philadelphia, 2016.
[2] King (R.), « Information services for smart grids », in Power and Energy Society General Meeting, volume 2008, Piscataway, 1–5. IEEE.
[3] Poirion (P.-L.), Toubaline (S.), D’Ambrosio (C.), and Liberti (L.), « The power edge set problem », Networks, 68(2):104–120, 2016.
[4] Poirion (P.-L.), Toubaline (S.), D’Ambrosio (C.), and Liberti (L.), « Algorithms and applications for a class of bilevel MILPs », Discrete Applied Mathematics, April 2018.
[5] Zavala (V.), Constantinescu (E.) and Anitescu (M.), « Economic impacts of advanced weather forecasting on energy system operations », in Power and Energy Society : Conference on Innovative Smart Grid Technology, pages 1–8, Piscataway, 2010, IEEE.
Articles similaires :
 Un défi colossal pour la recherche, la formation et l’innovation
Un défi colossal pour la recherche, la formation et l’innovation
 Le stockage de l’énergie élément clé de la transition énergétique
Le stockage de l’énergie élément clé de la transition énergétique
 De nouveaux générateurs à la frontière entre physique et mécanique
De nouveaux générateurs à la frontière entre physique et mécanique
 Le bâtiment intelligent, nouveau venu dans la transition énergétique
Le bâtiment intelligent, nouveau venu dans la transition énergétique
 Transition énergétique : l’enjeu managérial
Transition énergétique : l’enjeu managérial